



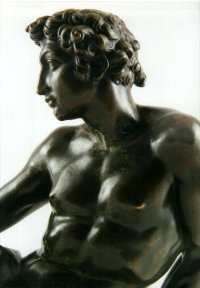
Felice Palma. Massa 1583-1625. Collezione / Collection.
Testi di Claudio Casini, Andrei Cristina, Ciarlo Nicola, Federici Fabrizio e Sara Ragni.
Testo Italiano e Inglese.
Pontedera, 2024; ril. in cofanetto, pp. 289, ill. b/n e col., tavv. b/n e col., cm 24,5x34.
(L'Oro Bianco. Straordinari Dimenticati. The White Gold Forgotten Masters).
prezzo di copertina: € 160.00
|

Libri compresi nell'offerta:
Felice Palma. Massa 1583-1625. Collezione / Collection.
Testi di Claudio Casini, Andrei Cristina, Ciarlo Nicola, Federici Fabrizio e Sara Ragni.
Testo Italiano e Inglese.
Pontedera, 2024; ril. in cofanetto, pp. 289, ill. b/n e col., tavv. b/n e col., cm 24,5x34.
(L'Oro Bianco. Straordinari Dimenticati. The White Gold Forgotten Masters).
OMAGGIO (prezzo di copertina: € 160.00)
Le botteghe del marmo
Testo Italiano e Inglese.
Ospedaletto, 1992; ril., pp. 153, 10 ill. b/n, 60 ill. col., cm 24x29.
(Immagine).
OMAGGIO (prezzo di copertina: € 34.49)
Museo Stefano Bardini. I Bronzetti e gli Oggetti d'Uso in Bronzo
A cura di Nesi A.
Firenze, 2009; br., pp. 191, 102 ill. b/n, 7 ill. col., cm 17x24,5.
(Museo Stefano Bardini).
OMAGGIO (prezzo di copertina: € 30.00)
Bronzetti e Rilievi dal XV al XVIII Secolo
Bologna, 2015; 2 voll., ril. in cofanetto, pp. 729, ill., tavv. col., cm 21,5x30,5.
OMAGGIO (prezzo di copertina: € 90.00)
Robotica industriale. Modellazione, pianificazione, controllo, programmazione, componentistica, normativa e sicurezza
Giovanni Legnani - Irene Fassi
CittàStudi Edizioni
Torino, 2025; br., pp. 748, ill., cm 19,5x25,5.
ISBN: 88-251-7475-6 - EAN13: 9788825174755
Testo in: 
Peso: 3.59 kg

Pietro Bellotti Detto Canaletty. Un Vedutista Veneziano nella Francia dell'Ancien Régime
Le radici del futuro. L'Europa dei popoli, il rifiuto degli stati nazionali e dei partiti
Luoghi Magici di Bologna. Vol. 1: la Piazza e i Suoi Simboli Segreti
Il leviatano algoritmico. La trasformazione silenziosa del lavoro e dell'essere umano

Elementi di tecnologia ceramica. Tra scienza, arte e innovazione
Conte e Mattarella. Sul palcoscenico e dietro le quinte del Quirinale. Un racconto sulle istituzioni